
1. 丸編み機技術の導入
1. 丸編み機の簡単な紹介
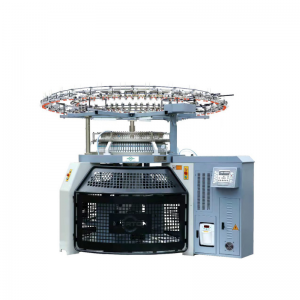
丸編み機(図1参照)は、綿糸を筒状の布地に編み上げる装置です。主に、各種起毛ニット生地、Tシャツ生地、各種模様付き穴あき生地などを編むために使用されます。構造上、シングルジャージ丸編み機とダブルジャージ丸編み機に分けられ、繊維業界で広く使用されています。
 2. プロセス要件
2. プロセス要件
(1)現場の作業環境は比較的高温であり、脱脂綿などにより冷却ファンが停止したり損傷したり、冷却穴が塞がれたりする可能性があるため、インバータには強い耐環境性が求められます。
(2)柔軟なインチング操作機能が必要です。インチングボタンは装置の多くの箇所に設置されており、インバータには迅速な応答が求められます。
(3)速度制御には3つの速度が必要です。1つは通常6Hz程度のインチング動作速度です。もう1つは通常の織り動作速度で、最高周波数は70Hzです。3つ目は低速ギャザー動作で、約20Hzの周波数が必要です。
(4)丸編み機の運転中は、モーターの逆転と回転を絶対に禁止してください。そうしないと、針床の針が曲がったり折れたりする可能性があります。丸編み機が単相ベアリングを使用している場合は、この点は考慮されません。システムが正転または逆転するかどうかは、モーターの正転と逆転に完全に依存します。一方では、逆転を禁止する機能が必要であり、他方では、回転を排除するためにDCブレーキを設定する必要があります。
3. パフォーマンス要件
ウィービングでは負荷が重く、インチング/始動を迅速に行う必要があるため、インバータには低周波数、高トルク、高速応答が求められます。周波数変換器はベクトル制御モードを採用し、モーターの速度安定化精度と低周波数域でのトルク出力を向上させます。
4. 制御配線
丸編み機の制御部は、マイクロコントローラまたはPLC + ヒューマンマシンインターフェース制御を採用しています。周波数変換器は端末から起動・停止を制御し、周波数はアナログ量または多段階の周波数設定によって与えられます。
多段速制御には基本的に2つの制御方式があります。1つはアナログ信号を用いて周波数を設定する方式です。ジョギング運転でも高速・低速運転でも、アナログ信号と運転指示は制御システムから与えられます。もう1つは周波数変換器を用いる方式です。内蔵の多段周波数設定では、制御システムが多段周波数切り替え信号を出力します。ジョギング運転はインバータ本体から供給され、高速ウィービング運転の周波数はインバータのアナログ量またはデジタル設定によって与えられます。
2. 現場要件と試運転計画
(1)現場要件
丸編み機業界では、インバータの制御機能に対する要件は比較的単純です。一般的には、端子に接続して始動・停止を制御したり、アナログ周波数で周波数を与えたり、多段変速で周波数を設定したりします。インチング運転や低速運転では高速化が求められるため、インバータはモーターを制御し、低周波で大きな低周波トルクを発生させる必要があります。一般的に、丸編み機のアプリケーションでは、周波数変換器のV/Fモードで十分です。
(2)デバッグ方式 当社が採用する方式は、C320シリーズセンサレス電流ベクトルインバータ、電力:3.7および5.5KWです。
3. デバッグパラメータと命令
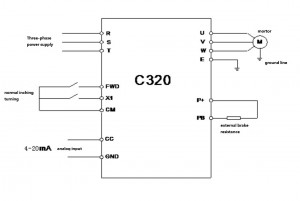
1. 配線図
2. デバッグパラメータの設定
(1)F0.0=0 VFモード
(2)F0.1=6周波数入力チャンネル外部電流信号
(3)F0.4=0001 外部端末制御
(4)F0.6=0010逆回転防止が有効
(5)F0.10=5 加速時間5秒
(6)F0.11=0.8減速時間0.8S
(7)F0.16=6 搬送周波数6K
(8) F1.1=4 トルクブースト4
(9) F3.0=6 X1を前進ジョグに設定
(10)F4.10=6 ジョグ周波数を6HZに設定する
(11) F4.21=3.5 ジョグ加速時間を3.5秒に設定する
(12)F4.22=1.5はジョグ減速時間を1.5秒に設定する
デバッグノート
(1)まずジョグしてモーターの方向を決めます。
(2)ジョギング中の振動や応答の遅さの問題に関しては、ジョギングの加速時間と減速時間を必要に応じて調整する必要がある。
(3)搬送波とトルクブーストを調整することで低周波トルクを向上させることができる。
(4)綿糸がエアダクトを塞ぎ、ファンが停止し、インバータの放熱性が低下する。このような状況は頻繁に発生する。現在、一般的なインバータは、過熱警報をスキップし、エアダクト内の糸くずを手動で取り除いてから使用を継続している。
投稿日時: 2023年9月8日